16-384, Robot Kinematics and Dynamics
Background
As a graduate student at CMU, I worked with my advisor Dr. Howie Choset to create an online curriculum for undergraduate robotics. Before, this course was taught via a “traditional” format of lectures, hand-written assignments, and textbook readings. While there were lab projects with real robots, the other listed components were rather static and passive for many students’ learning.
In order to supplement the above materials, we sought to design an independent component that would
- demonstrate problem solving in addition to introducing concepts,
- provide immediate feedback like a virtual tutor, and
- provide a better evaluation of student learning.
This ultimately led to an online, interactive platform.
Lecture Videos
The creation of lecture videos for students to watch and review on their own time was a natural first step. However, instead of simply uploading recordings of actual lectures delivered in class, we opted to produce special “concept” and “example” videos, similar to the style of many other online self-study courses. This provided two advantages: enrolled students would have yet another way of learning material separate from lecture, and this content would be easily distributed to external students with little modification.
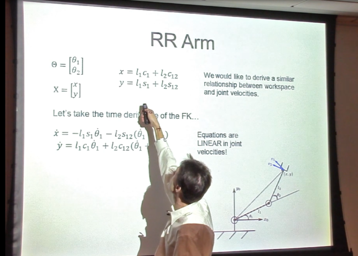 | 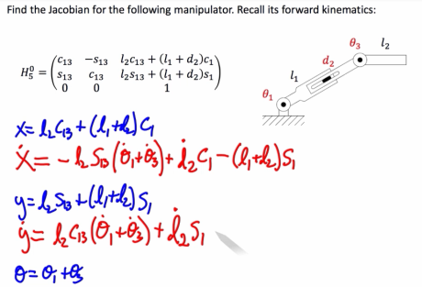 |
An example of a concept video is shown above left. These were generally short (up to 10 minutes), concise, and cohesive. They generally emphasized the big picture and learning objectives. The right figure shows an example video, in which a problem is worked out in detail. These focused on methods and techniques, assuming prior knowledge of the concept, and were meant to replicate assessments. Put together, these videos were thus an alternative to a typical textbook, but in a modular and personalized format.
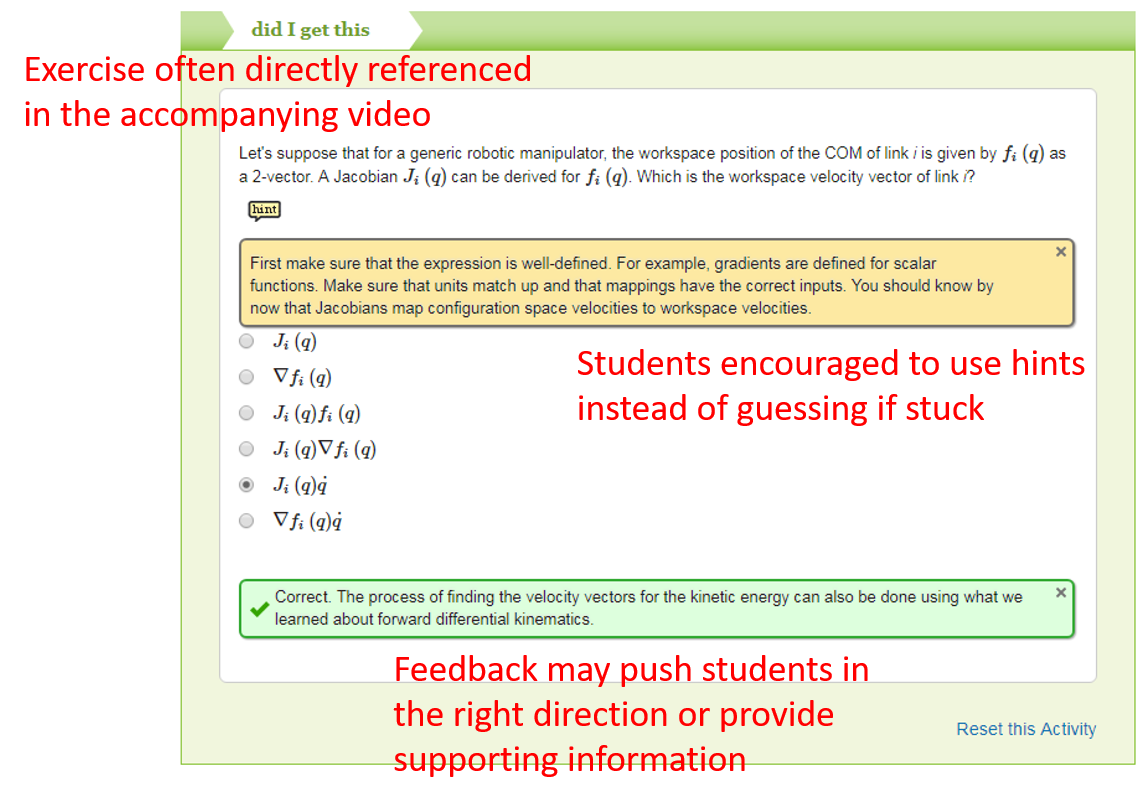
Interactive Exercises
While lecture videos helped with our first goal of presenting concepts and problem solving in an alternative format, we next attached a variety of exercises to these videos to tackle our other goals. Again, this mirrored the format of a typical textbook, but the difference here is that such activities would be instananeously interactive (in contrast to traditional assignments) and informative to instructors.
Hybrid Flipped Course
Putting the above components together, we obtained an online curriculum much like that of a typical MOOC. While we could have released it in that way (and we may do so in the near future), so far we have chosen to restrict its access to regular students enrolled in the CMU course and make it a required component. By assigning the corresponding videos and exercises prior to a lecture, students received early exposure to the material. That in turn allowed the instructor to review student submissions and address any learning gaps displayed by students as a whole early on, before they moved on to the longer and in depth assignments and labs. Our novel implementation of this online platform was thus a “hybrid” flipped course.